1. 配置确认
# 硬件接线
1. 12V电源
2. USB转Type-C
3. 舵机串口线
# 进入代码目录
d:
cd suo\code\lerobot
conda activate lerobot
# 分别查看主从臂端口
python lerobot/scripts/find_motors_bus_port.py
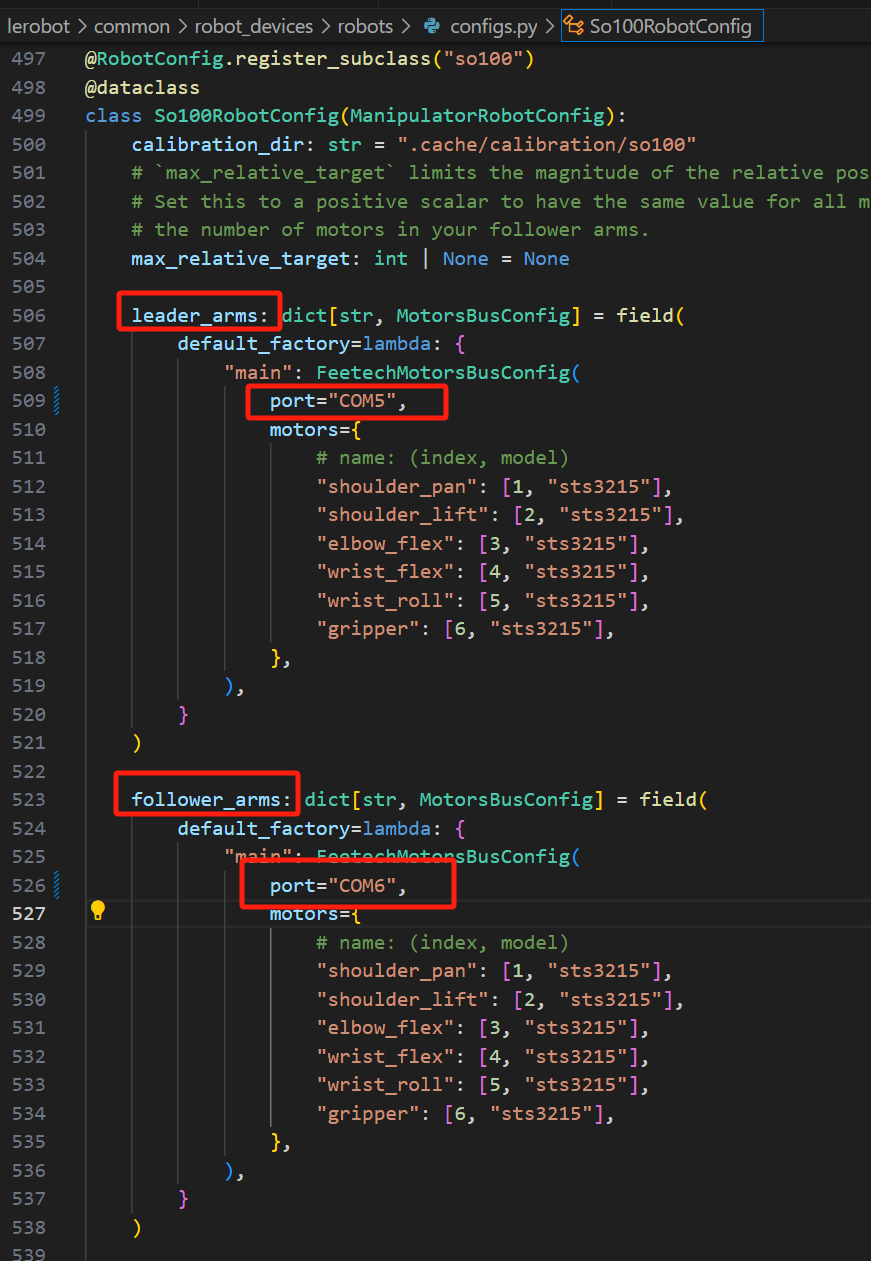
# 更新配置:lerobot\common\robot_devices\robots\configs.py: so100
leaderr_arms.port = "COM5"
follower_arms.port = "COM6"
2. 程序执行
python lerobot/scripts/control_robot.py --robot.type=so100 --robot.cameras={} --control.type=teleoperate
启动后,即可操控主臂遥控从臂
具身开源套件部分课程如下,欢迎联系合作采购(全套开源)
- 树莓派上配置机器人环境
- 电脑主机上配置机器人环境
- 机器人硬件组装
- 基于硬件更新软件配置
- 配置舵机ID
- 机器人标定
- 机器人远程遥控
- 机器人数据集记录
- 机器人模型训练与评估
- 只有lerobot机械臂的全流程:标定、遥控、数据录制、训练、源码解读
- 仅双臂时,主从同步演示步骤
- lerobot开源机械臂10次训练记录