1、创建一个功能包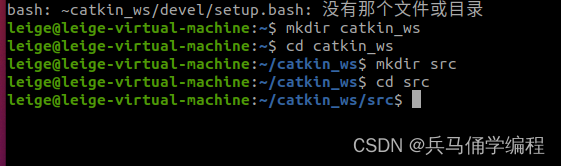
并下载git
sudo apt install git
2、找到自己想在github上要克隆的包

复制此链接
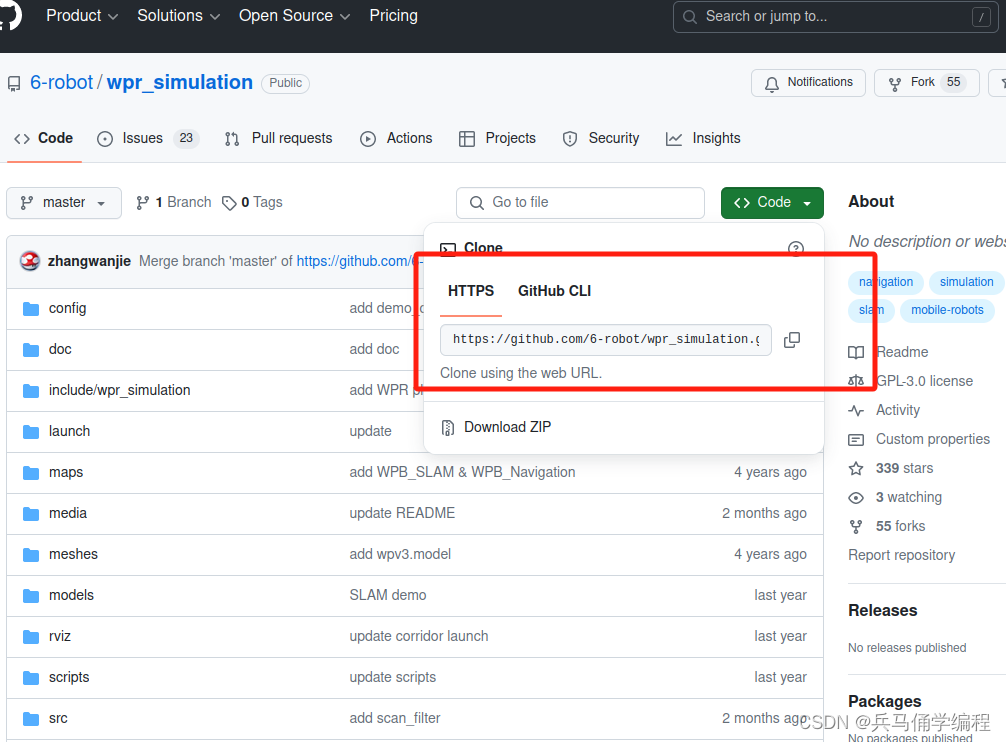
3、克隆到本地
git clone +链接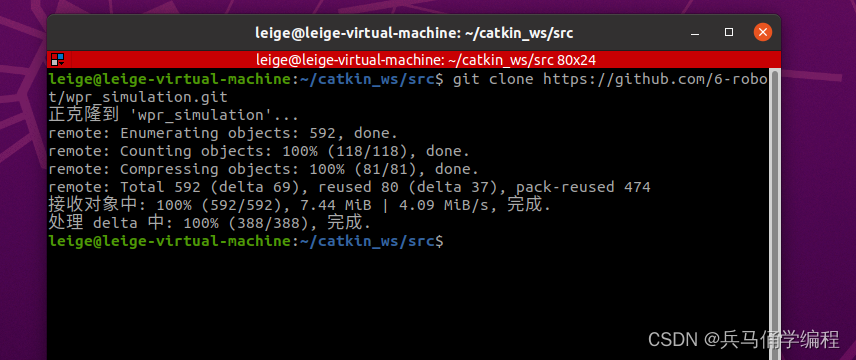
4.scripts目录用于放置脚本文件和python程序
使用脚本安装编译需要的依赖库

5、下载完成后,在~catkin_ws目录下运行catkin_make进行编译

编译完成后,进入工作空间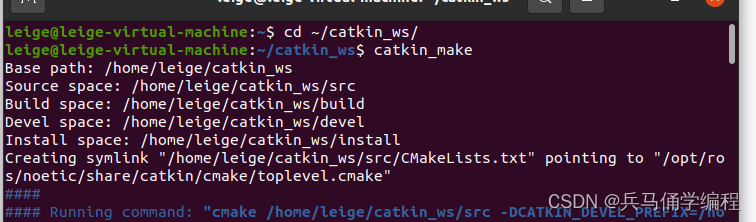
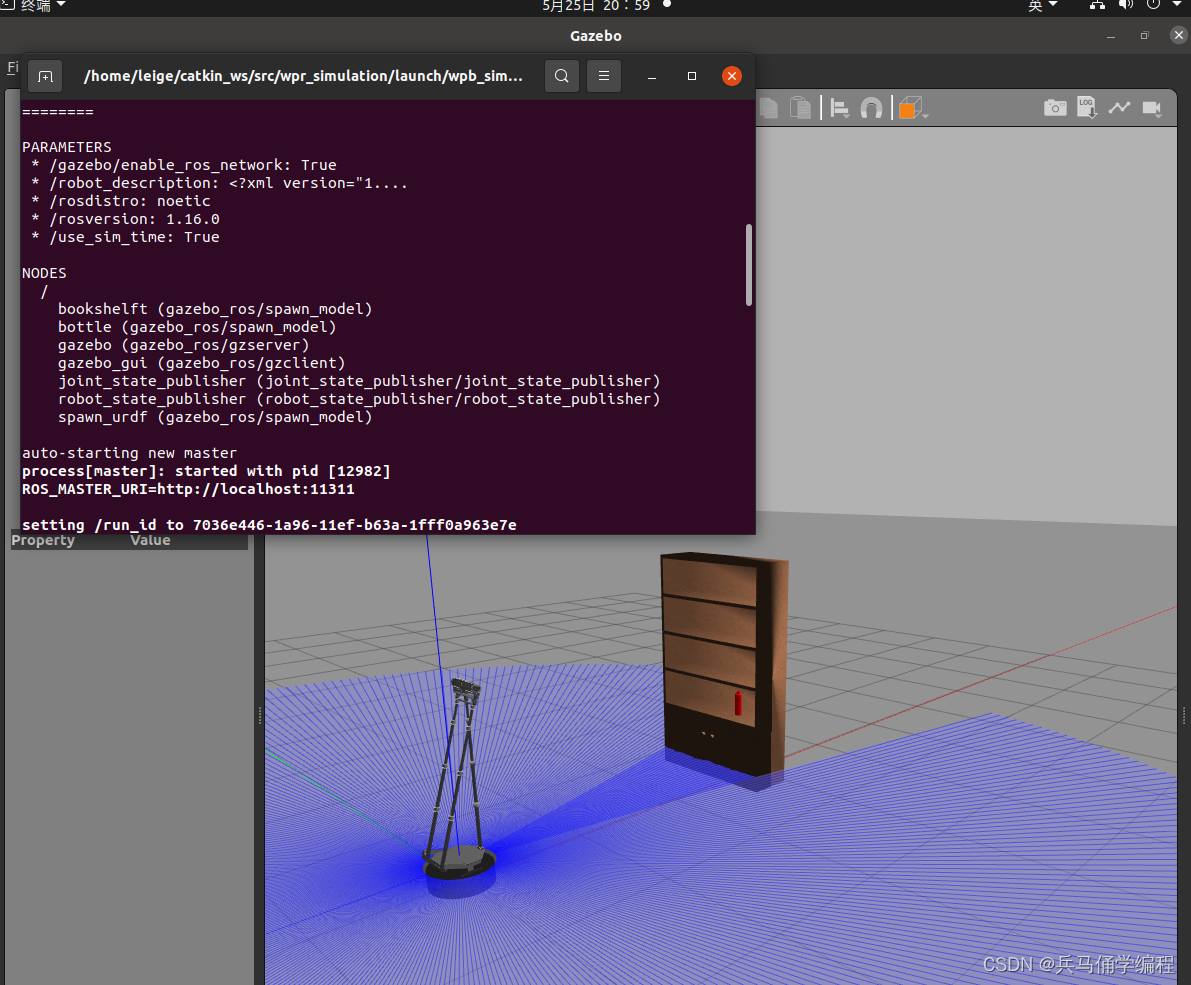
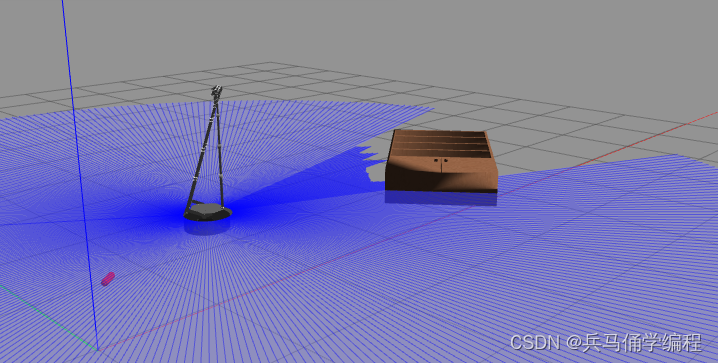
6.使用source指令载入工作空间的环境设置;然后使用roslaunch运行编译好的Ros程序

ok,进来了,launch运行成功
7、调出速度控制器
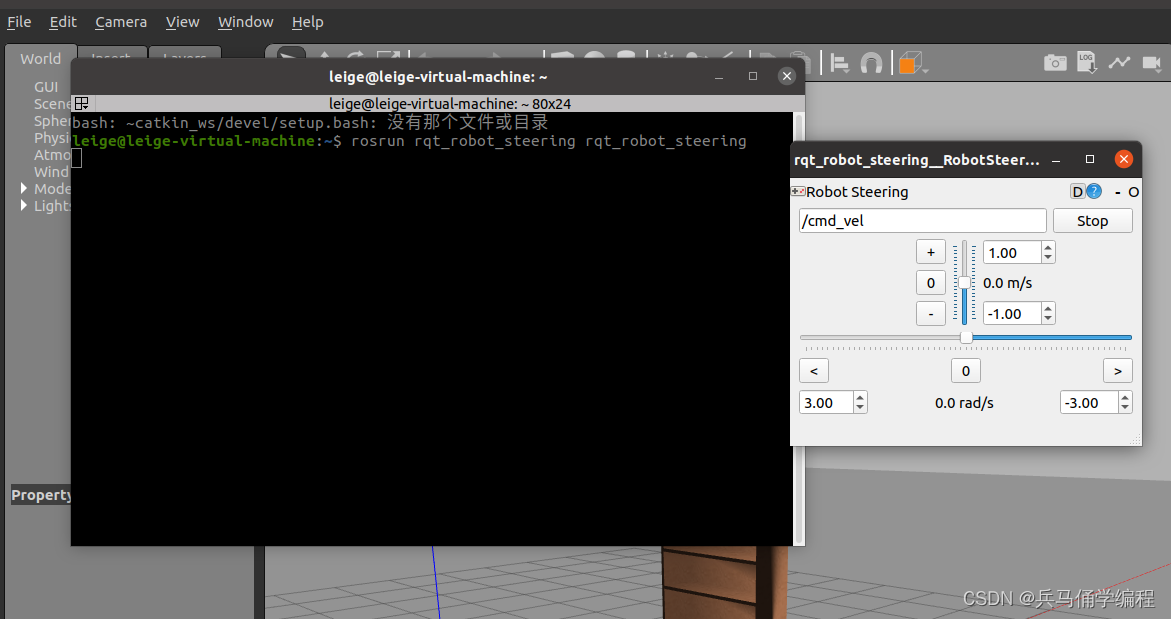
击倒它;
最后:
通常我们会把设置工作空间环境参数的source指令,添加到终端程序初始化的脚本~/.bashrc 文件中;这样每次打开终端就可以马上运行Ros程序了
gedit ~/.bashrc
滑到最下面;
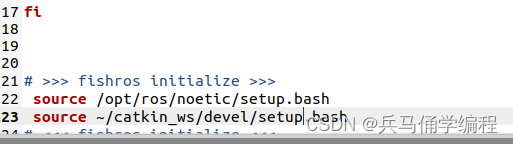
保存退出;