目录
1. 前言
2. Policy Gradient算法原理
2.1 公式原理
2.2 工作机制
3. Policy Gradient算法的优势
4. Policy Gradient算法的挑战
5. Policy Gradient算法:倒立摆稳定
6. 总结
1. 前言
在强化学习领域,Policy Gradient算法是一种直接优化策略的方法,与基于价值的方法不同,它不依赖于估计状态的价值函数。Policy Gradient算法通过调整策略的参数来最大化期望奖励,适用于处理连续动作空间和复杂任务。本文将详细介绍Policy Gradient算法的原理、优势、挑战,并提供一个完整的Python实现,帮助大家深入理解这一算法。
简单一句话就是:学习一种达到目标的策略,使得目标函数(每步奖励与决策概率对数函数的乘积之和)最大化。
2. Policy Gradient算法原理
2.1 公式原理
Policy Gradient算法的核心思想是通过计算目标函数J(θ)关于策略参数θ的梯度,来优化策略。目标函数J(θ)定义为:
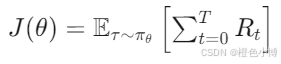
其中,R_t是时间t的奖励,期望是基于策略πθ下的状态和动作分布,其中,τ 表示一个完整的轨迹(状态、动作、奖励的序列),πθ 是参数为 θ 的策略。
该式推导如下:
假设在一个episode中,智能体与环境交互所产生的状态信息和行为形成一个集合,称为迹。

对于某个迹而言,其发生的可能性可以表示为一系列条件概率的乘积。

其中,θ是智能体决策参数,可以当做智能体自己的神经网络中的权重。
用连乘符号,上面这个式子可以表示为:

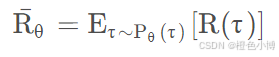
对于某智能体而言,在多个episode中,得到的迹可能是不同的。因此,训练智能体的最终目标是要最大化在各个迹上的期望奖励。
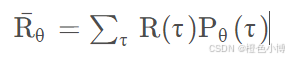
又可以表示为:
为了最大化 J(θ),我们计算其梯度:

其中:
-
logπθ(at∣st) 是动作 at 在状态 st 下的对数概率。
-
R(τ) 是轨迹 τ 的累积奖励。
2.2 工作机制
-
Rollout:代理按照当前策略与环境交互,收集状态、动作和奖励。
-
计算回报:计算从时间t开始的累积奖励G_t,通常使用折扣和的方式。
-
计算梯度:使用收集的数据计算目标函数关于策略参数的梯度。
-
更新策略:通过梯度上升更新策略参数,以提高期望回报。
3. Policy Gradient算法的优势
-
处理连续动作空间:Policy Gradient算法能够处理连续和高维的动作空间,而传统的基于价值的方法则难以做到。
-
直接优化策略:无需近似价值函数,直接优化策略。
-
复杂环境表现良好:在具有复杂状态空间和难以估计价值函数的环境中表现良好。
4. Policy Gradient算法的挑战
-
高方差:策略梯度估计通常具有高方差,导致训练不稳定。可以通过使用基线函数或PPO等方法来降低方差。
-
样本效率低:需要大量与环境的交互才能收敛。
-
局部最优:可能陷入局部最优,导致策略次优。
5. Policy Gradient算法:倒立摆稳定
以下是一个使用Policy Gradient算法解决CartPole问题的Python实现:
import gym
import numpy as np
import torch
import torch.nn as nn
import torch.optim as optim
from torch.distributions import Categorical
from collections import deque# 改进后的策略网络
class Policy(nn.Module):def __init__(self):super(Policy, self).__init__()self.fc1 = nn.Linear(4, 128) # 输入层self.fc2 = nn.Linear(128, 128) # 隐藏层self.fc3 = nn.Linear(128, 2) # 输出层self.saved_log_probs = []self.rewards = []self.entropy = [] # 用于熵正则化def forward(self, x):x = torch.relu(self.fc1(x))x = torch.relu(self.fc2(x))x = self.fc3(x)return xdef act(self, state):state = torch.from_numpy(state).float().unsqueeze(0)logits = self.forward(state)probs = torch.softmax(logits, dim=-1)m = Categorical(probs)action = m.sample()# 记录熵正则化项(确保是1维张量)entropy = m.entropy().mean().unsqueeze(0)self.entropy.append(entropy)self.saved_log_probs.append(m.log_prob(action))return action.item()# 训练函数
def reinforce_with_baseline(n_episodes=1000, max_t=1000, gamma=0.99,print_every=100, entropy_coeff=0.01):scores_deque = deque(maxlen=100)scores = []policy = Policy()optimizer = optim.Adam(policy.parameters(), lr=3e-4) # 调整学习率for i_episode in range(1, n_episodes + 1):saved_log_probs = []rewards = []entropy = []state, _ = env.reset()for t in range(max_t):action = policy.act(state)saved_log_probs.append(policy.saved_log_probs[-1])entropy.append(policy.entropy[-1])state, reward, done, _, _ = env.step(action)rewards.append(reward)if done:break# 计算折扣奖励R = 0returns = []for r in reversed(rewards):R = r + gamma * Rreturns.insert(0, R)# 归一化奖励returns = torch.tensor(returns)returns = (returns - returns.mean()) / (returns.std() + 1e-8)# 计算策略损失policy_loss = []for log_prob, R in zip(saved_log_probs, returns):policy_loss.append(-log_prob * R)# 添加熵正则化entropy_loss = -torch.cat(entropy).mean() * entropy_coeff# 总损失loss = torch.cat(policy_loss).sum() + entropy_loss# 更新策略网络optimizer.zero_grad()loss.backward()optimizer.step()# 记录分数scores_deque.append(sum(rewards))scores.append(sum(rewards))if i_episode % print_every == 0:print('Episode {}\tAverage Score: {:.2f}'.format(i_episode, np.mean(scores_deque)))return scores, policy# 初始化环境
env = gym.make('CartPole-v1')# 训练改进后的策略
scores, policy = reinforce_with_baseline(n_episodes=1000, entropy_coeff=0.01)# 测试策略
def test_policy(policy, env, n_episodes=100):scores = []for _ in range(n_episodes):state, _ = env.reset()score = 0while True:action = policy.act(state)state, reward, done, _, _ = env.step(action)score += rewardif done:breakscores.append(score)return np.mean(scores)# 测试并打印结果
avg_score = test_policy(policy, env, n_episodes=100)
print(f'Average Score over 100 episodes: {avg_score:.2f}')-
Categorical(probs)定义一个分类分布(Categorical Distribution),其中probs是动作的概率分布。 -
这个分布用于从动作空间中采样动作。
-
m.log_prob(action)计算采样动作的对数概率。 -
self.saved_log_probs是一个列表,用于保存每个采样动作的对数概率。 -
这些对数概率在后续计算策略梯度时会用到。
-
n_episodes:训练的总回合数,默认为1000。每个回合代表与环境的一次完整交互,直到环境终止。 -
max_t:每个回合的最大时间步数,默认为1000。用于限制每个回合的长度,防止无限循环。 -
gamma:奖励的折扣因子,默认为0.99。用于计算累积奖励时的折扣,强调近期奖励或远期奖励的重要性。 -
print_every:打印信息的间隔,默认为100。每print_every个回合打印一次当前的平均奖励,用于监控训练进度。
熵正则化的效果
-
探索性增强:熵正则化鼓励策略在训练过程中尝试更多的动作,避免过早收敛到局部最优解。
-
稳定性提升:通过增加探索,策略能够更好地适应环境的变化,提高训练的稳定性。
-
超参数调整:
entropy_coeff控制熵损失的权重。较大的值会增加探索,但可能导致收敛速度变慢;较小的值可能减少探索,但可能导致局部最优。
6. 总结
Policy Gradient算法是一种强大的强化学习方法,适用于处理连续动作空间和复杂任务。通过直接优化策略,它能够有效地解决传统基于价值的方法难以处理的问题。然而,该算法也面临高方差和样本效率低等挑战。通过使用基线函数或更先进的方法(如PPO),可以有效降低方差并提高训练稳定性。本文提供的Python实现展示了如何使用Policy Gradient算法解决CartPole问题,为大家提供了一个直观的学习和实践示例。我是橙色小博,关注我,一起在人工智能领域学习进步!