本问所述的程序构建了一套基于接收信号强度(RSSI)的三维动态定位系统,融合扩展卡尔曼滤波技术实现运动轨迹优化。系统通过多基站协同定位,为室内定位、无人机导航等场景提供算法验证框架。
文章目录
- 程序详解
- 核心功能模块
- 可视化与分析体系
- 技术特征
- 运行结果
- MATLAB代码
程序详解
核心功能模块
-
环境建模模块
- 支持锚点自适应(锚点数量>4即可,可一键修改锚点数量),可扩展基站布局,自动生成三维空间分布
- 构建对数路径损耗模型: R S S I ( d ) = R S S I 0 − 10 n log 10 ( d ) + ε RSSI(d) = RSSI_0 - 10n\log_{10}(d) + \varepsilon RSSI(d)=RSSI0−10nlog10(d)+ε
- 模拟运动轨迹:例程包含X-Y平面线性运动与Z轴悬停的复合运动模式
-
信号处理模块
- 动态计算基站-目标距离矩阵
- 添加高斯噪声模拟真实信号强度波动
- 采用伪逆矩阵法解超定方程组,实现三维坐标最小二乘估计
-
滤波优化模块
- 构建9维状态空间模型(位置+速度+加速度)
- 设定过程噪声
- 实施EKF预测-校正双阶段迭代:
- 状态预测: X ^ k − = F X ^ k − 1 + w k \hat{X}_k^- = F\hat{X}_{k-1} + w_k X^k−=FX^k−1+wk
- 协方差传播: P k − = F P k − 1 F T + Q P_k^- = FP_{k-1}F^T + Q Pk−=FPk−1FT+Q
- 卡尔曼增益: K k = P k − H T ( H P k − H T + R ) − 1 K_k = P_k^-H^T(HP_k^-H^T + R)^{-1} Kk=Pk−HT(HPk−HT+R)−1
- 状态更新: X ^ k = X ^ k − + K k ( Z k − H X ^ k − ) \hat{X}_k = \hat{X}_k^- + K_k(Z_k - H\hat{X}_k^-) X^k=X^k−+Kk(Zk−HX^k−)
可视化与分析体系
-
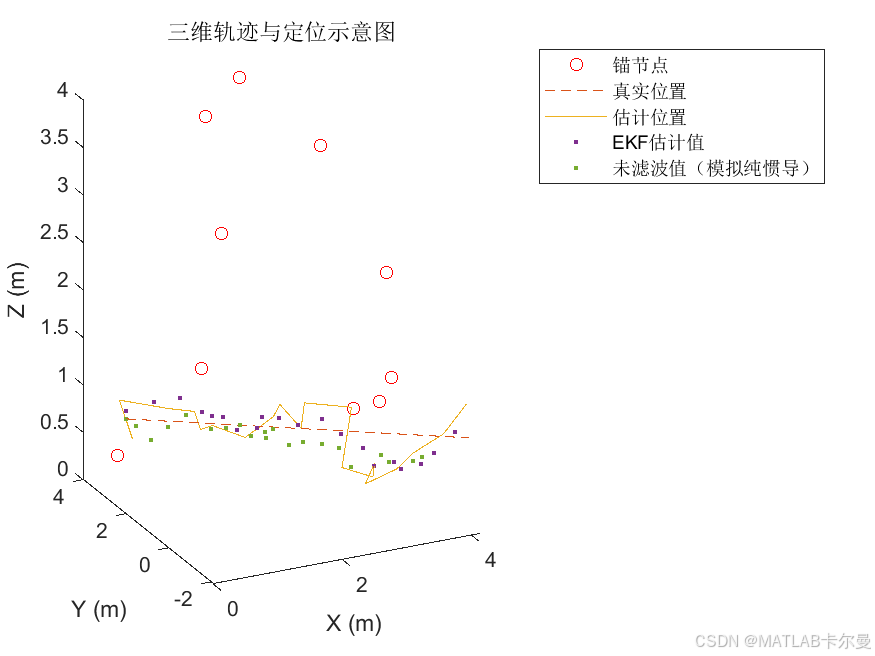
三维轨迹对比
- 同步显示锚节点、真实轨迹、RSSI观测值、EKF估计值及纯惯导轨迹
- 采用多视角三维渲染技术增强空间感知
-
误差分析系统
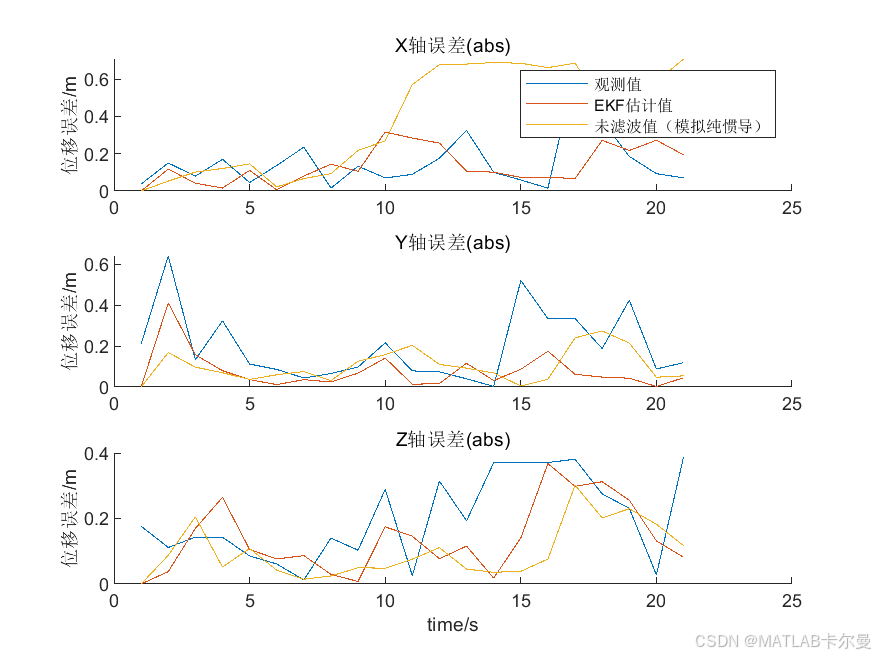
- 分轴绘制位移误差演变曲线(X/Y/Z)
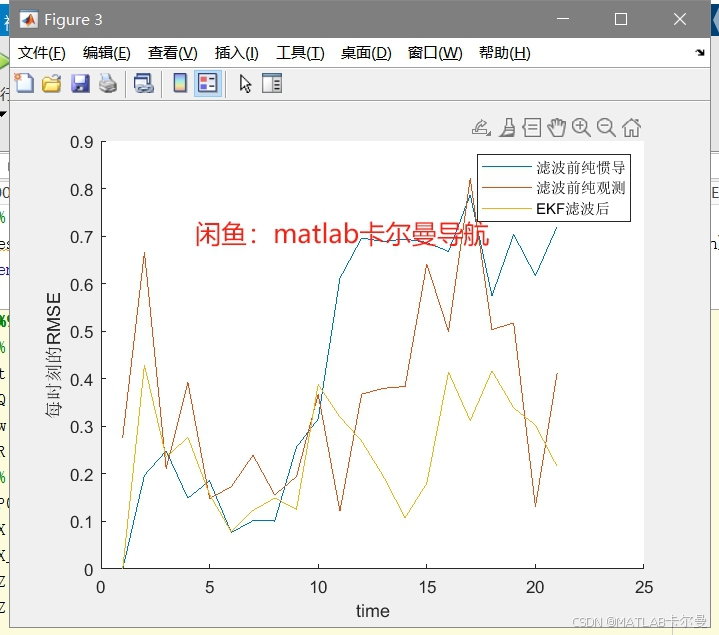
- 动态计算每时刻均方根误差(RMSE)
- 终端输出终点坐标误差统计
-
性能评估指标
- 最大RMSE对比
- 误差收敛性分析
技术特征
- 多模态数据融合:整合无线信号观测与惯性运动预测
- 参数可配置性:噪声方差、衰减因子、基站数量等参数开放调整
- 模块化架构:定位算法(
rssi_localization)与滤波模块独立封装 - 工程实践特性:
- 支持蒙特卡洛仿真(通过
rng(0)固定随机种子) - 自动生成png格式的误差图(
saveas(gcf,'三轴误差对比.png')) - 提供终端量化分析报告
- 支持蒙特卡洛仿真(通过
运行结果
三维轨迹与定位示意图:
三轴误差曲线对比:
RMSE曲线对比:
命令行输出结果:

MATLAB代码
部分代码如下:
% RSSI定位程序,N个锚点、三维空间,使用EKF对轨迹进行滤波
% 作者:matlabfilter(接导航、定位、滤波相关的matlab程序定制)
% 2025-03-15/Ver1
clear; clc; close all; % 清除工作区、命令窗口和关闭所有图形窗口
rng(0)
%% 模型初始化
RSSI_err = 0.5; % 定义RSSI测量误差
n = 10; %定义锚节点数量
% 定义锚节点位置 (x, y)
baseP = 2*[sin(1:n)+0.01*[1:n]+1;cos(4*(1:n))+0.01*[1:n]+1;cos(2*(1:n))+0.01*[1:n]+1]';
% 使用正弦和余弦函数生成锚节点坐标,并添加微小随机偏移% 定义信号强度与距离的关系
% 假设信号强度衰减模型为: RSSI(d) = RSSI_0 - 10*n*log10(d)
RSSI_0 = -30; % 在1米处的信号强度
n = 2; % 衰减因子% 模拟未知点的位置
point1 = [0,2,1]; %待求点坐标真值
% 生成目标的运动
positions = repmat(point1,21,1)+[0:0.2:4;0:-0.2:-4;zeros(1,21)]';
%% 定位程序
for i1 = 1:size(positions,1)point1 = positions(i1,:);distances = sqrt(sum((baseP - point1).^2, 2)); % 计算距离RSSI_measurements = RSSI_0 - 10*n*log10(distances) + RSSI_err*randn(size(distances)); % 添加噪声% 定位函数estimated_position(i1,:) = rssi_localization(RSSI_measurements, baseP, RSSI_0, n);
end%% EKF部分
% 滤波模型初始化
t = 1:1:size(positions,1); %设置时间序列
Q = 0.01 * diag([1, 1, 1]); % 过程噪声协方差矩阵
w = sqrt(Q) * randn(size(Q, 1), length(t)); % 过程噪声
R = 0.1 * diag([1, 1, 1]); % 观测噪声协方差矩阵
% v = sqrt(R) * randn(size(R, 1), length(t)); % 观测噪声
P0 = 0.2 * eye(3); % 初始状态协方差矩阵
X = zeros(3, length(t)); % 真实状态
X_ekf = zeros(3, length(t)); % 扩展卡尔曼滤波估计的状态
Z = zeros(3, length(t)); % 观测值形式
Z(:, 1) = [X(1,1); X(2, 1); X(3, 1)]; % 设置观测量初值% 运动模型
X_ = zeros(3, length(t)); %给带误差的(未滤波的)状态量建立空间
X_ekf(:, 1) = positions(1,:)';
X(:, 1) = positions(1,:)';
X_(:, 1) = positions(1,:)'; %给带误差的状态量赋初值完整代码下载链接:https://download.csdn.net/download/callmeup/90486319
或:
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者