飞行控制PID算法——无人机飞控_飞控算法-CSDN博客
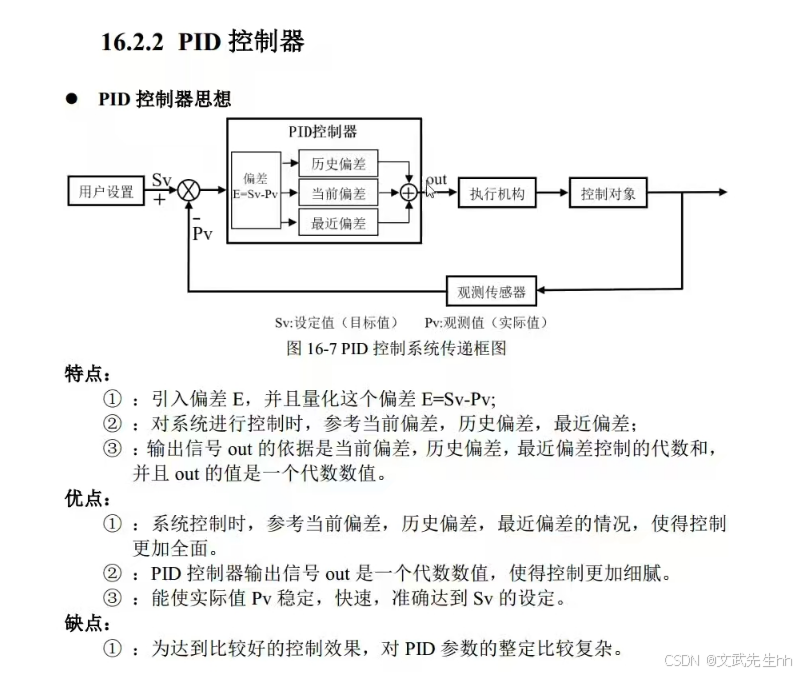

首先pid是对现测量值和目标值的差值,即偏差值的操作
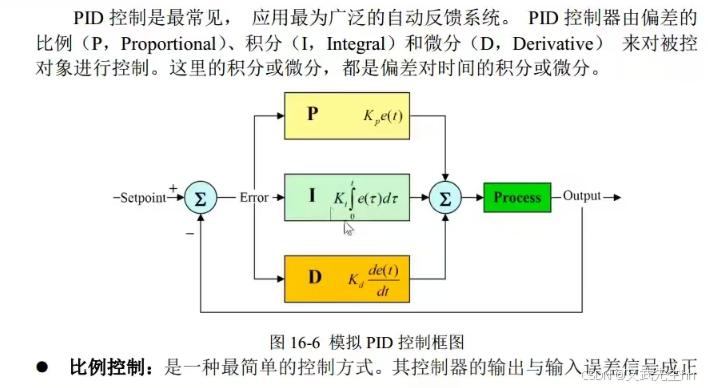
p是线性操作,偏差越大,则对于控制单元操作的值越大
d是微分操作,我们知道微分其实就是数值变化的斜率,所以当偏差越小,则数据曲线越接近目标值,斜率就越小,则对控制单元的操作值越小
i是积分操作,是一段时间的累计偏差,累计误差一段时间,发现误差大了,那就对控制单元的操作值越大,是被控对象回到正轨
飞行控制PID算法——无人机飞控_飞控算法-CSDN博客
首先pid是对现测量值和目标值的差值,即偏差值的操作
p是线性操作,偏差越大,则对于控制单元操作的值越大
d是微分操作,我们知道微分其实就是数值变化的斜率,所以当偏差越小,则数据曲线越接近目标值,斜率就越小,则对控制单元的操作值越小
i是积分操作,是一段时间的累计偏差,累计误差一段时间,发现误差大了,那就对控制单元的操作值越大,是被控对象回到正轨
版权声明:
本网仅为发布的内容提供存储空间,不对发表、转载的内容提供任何形式的保证。凡本网注明“来源:XXX网络”的作品,均转载自其它媒体,著作权归作者所有,商业转载请联系作者获得授权,非商业转载请注明出处。
我们尊重并感谢每一位作者,均已注明文章来源和作者。如因作品内容、版权或其它问题,请及时与我们联系,联系邮箱:809451989@qq.com,投稿邮箱:809451989@qq.com